3.1.3.6.Система катушек со скрещенными осями
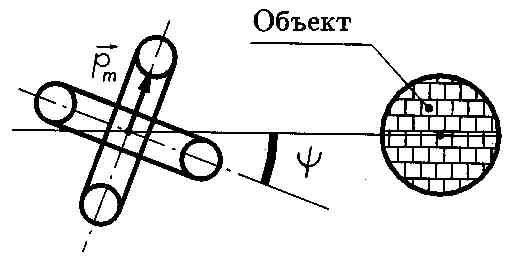
Рис. 10. Ориентация датчика по крену.
Вид вдоль оси датчика металлоискателя при таком расположении катушек приведен на рис.10. Для расчета такой схемы удобно воспользоваться принципом суперпозиции и разложить вектор магнитного момента излучающей катушки и площадь приемной катушки на вертикальную и горизонтальную составляющие (проекции, см. рис.11).
Для горизонтальной составляющей, проекция индукции поля в приемной катушке Вон будет попрежнему определяться соотношением (1.4). Однако, иная ориентация магнитного момента дает (с точностью до знака) результат:

где К2 определяется по формуле (1.11).
Вертикальная составляющая индукции поля в приемной катушке Bov перпендикулярна векторам r и r' и не зависит в явном виде от углов g и b:
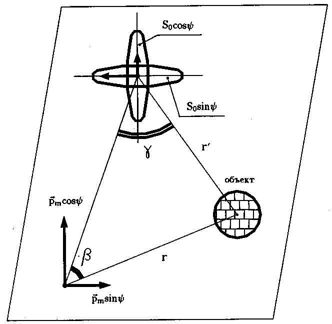
Рис.11. Разложение магнитного момента и площади приемной катушки на составляющие.

ЭДС в приемной катушке Uo , с точностью до знака, составляет:

Отсюда получаем:

В декартовой системе координат с началом в середине базы системы катушек (см. рис.5) получим:

Введя нормированные координаты (1.14), получим:
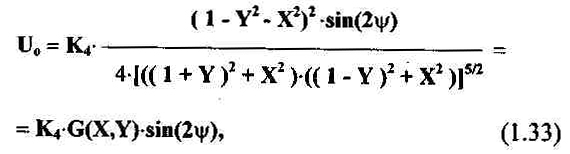
где К4 вычисляется по формуле (1.19) или (1.24).