
6. 2. 5. Ультразвуковой датчик системы охранной сигнализации
На первоначальном этапе разработки ультразвуковых датчиков системы обнаружения движущегося объекта строили так, как это схематически показано на рис. 6. 69, а. Излучатель BF1 и приемник ВМ1 располагали на противоположных стенах помещения, под потолком (для снижения влияния внутренней обстановки). Излучатель BF1 возбуждал в пространстве помещения стабильные по частоте и амплитуде ультразвуковые колебания. Микрофон (приемник) ВМ1 преобразовывал принятый из пространства ультразвуковой сигнал в электрический. Далее, в электронном устройстве этот сигнал усиливался, детектировался и анализировался по амплитуде. В случае колебания амплитуды ультразвукового сигнала формировался сигнал тревоги.
Рис. 6. 69. Построение ультразвуковых систем обнаружения
Отчего же происходят колебания амплитуды принятого ультразвукового сигнала? Предположим, что помещение идеально, т. е. представляет собой герметически замкнутое пространство, ограниченное жесткими стенами. Поскольку излучение не является остронаправленным, к микрофону ВМ1 вместе с прямой волной приходят волны, отраженные от стен, потолка и пола. Энергия волны в зоне микрофона ВМ1, как, впрочем, и на любой поверхности помещения, есть результат интерференции всех подающих волн. Пока в помещении не происходит какого-либо перемещения отражающих или поглощающих поверхностей или изменения физических свойств среды, интерференционная картина, а значит и уровень энергии волны в каждой точке, будут постоянны.
Любое движение в помещении приведет к изменению пути прохождения ультразвуковых волн, а следовательно, к изменениям интерференционной картины. Это приведет к колебаниям амплитуды выходного сигнала микрофона ВМ1. Регистрируя эти колебания, можно обнаружить перемещение в замкнутом пространстве.
Данный способ обнаружения подвижных объектов обеспечивает очень высокую чувствительность при высокой экономичности, поскольку волна от излучателя BF1 к приемнику ВМ1 проходит через помещение по наиболее короткому пути, а следовательно имеет наименьшее затухание.
Однако в реальных условиях эта система практически неработоспособна из-за чрезвычайно высокой вероятности ложных срабатываний. Система реагирует даже на поток воздуха, т. к. сложение скорости звука со скоростью воздуха изменит характер прохождения волны, что будет воспринято микрофоном ВМ1 как перемещение объекта.
Для повышения устойчивости системы излучатель BF1 и приемник ВМ1 располагают на одной стене (рис. 6. 69, б). Длина пути волны увеличивается в два раза, что потребует значительного увеличения излучаемой мощности. Но при этом из-за того, что волна проходит через поток воздуха дважды — туда и обратно, приращение скорости взаимно компенсируется, что и повышает устойчивость устройства к ложным срабатываниям в условиях относительно равномерных потоков воздуха, движущихся в любых направлениях.
В реальных условиях потоки воздуха могут быть весьма неравномерными. Кроме того, существенный вклад в нестабильность интерференционной картины в реальном помещении вносят деформации стекол и дверей в результате порывов ветра снаружи, разного рода вибрации и другие факторы. Все это привело к тому, что охранная система, построения по описанному выше принципу, оказалась нежизнеспособной.
Существенно повысить помехоустойчивость позволяет применение иного метода детектирования сигнала — не по амплитуде, а по частоте. Если объект перемещается вдоль направления распространения волны (рис. 6. 69, б), отраженная от него волна будет иметь некоторое смещение по частоте относительно излучаемой. Это явление получило название эффекта Доплера. Из-за разно-направленного отражения волн в реальном помещении эффект Доплера проявляется и при строго перпендикулярном указанному перемещению объекта, правда, несколько слабее. Поэтому объект, движущийся в любом направлении, будет обнаружен.

Рис. 6. 70. Структурная схема ультразвукового датчика
Несмотря на достоинства, детектирование с использованием эффекта Доплера не снимает полностью проблему ложных срабатываний. Существует определенный предел интенсивности воздушных потоков и других факторов, выше которого датчик будет регистрировать ложные перемещения.
Структурная схема ультразвукового доплеровского датчика представлена на рис. 6. 70. В качестве излучателя BF1 и приемника ВМ1, как правило, используют высокоэффективные резонаторы из пьезокерамики.
В состав аппаратной части ультразвукового датчика входят следующие блоки:
излучатель BF1; приемник ВМ1; эталонный генератор G1; входной усилитель А1; преобразователь U1; фазовый детектор U2; фильтр нижних частот Z1;
фильтр верхних частот Z2; детектор-формирователь U3; выходной усилитель А2; устройство индикации HI.
Излучатель BF1 ультразвуковой волны служит нагрузкой эталонного генератора G1. Рабочую частоту выбирают как компромисс между помехоустойчивостью и затуханием ультразвуковых колебаний в воздухе. Чем больше частота, тем меньше мешающее влияние естественных и искусственных шумов, воспринимаемых датчиком, однако с увеличением частоты повышается затухание волны, и для нормальной работы датчика необходимо увеличивать мощность излучения (пропорционально квадрату частоты). Наиболее подходящей является частота около 40 кГц. Мощность излучения выбирается из соображений приемлемой экономичности, требуемого уровня принимаемого сигнала и объема контролируемого пространства.
Входной усилитель А1 должен обеспечивать уверенный прием отраженного сигнала в условиях значительного колебания его амплитуды. Для снижения влияния помех необходима высокая избирательность усилителя в интервале fg ± fd- где fg — рабочая частота генератора, fd — доплеровский сдвиг, реально не превышающий 1 кГц.
Для исключения зависимости входного сигнала от амплитудной составляющей в усиленном принятом сигнале выделяют точки перехода через «нуль» и формируют сигнал прямоугольной формы. Эту функцию выполняет преобразователь U1.
Заметим здесь, что понятие о частотном доплеровском сдвиге не вполне корректно, поскольку реальный входной сигнал будет представлять собой частотный спектр. Если, например, движущийся объект представляет собой цельную отражающую поверхность, вместе с сигналом основной частоты будет присутствовать сигнал доплеровского сдвига, амплитуда которого будет пропорциональна отношению энергии волны, приходящей от объекта, к энергии всех приходящих волн. Иначе говоря, амплитуда сигнала доплеровского сдвига будет зависеть от площади объекта.
Если волна, отраженная от движущегося объекта, по амплитуде не превышает сумму волн, отраженных от стен помещения, то сигнал после преобразователя будет иметь фазовую, а не частотную модуляцию. В противном случае, к фазовой добавится частотная модуляция.
Вместе с отраженными от стен, приемник зафиксирует и волны, отраженные от всех поверхностей объекта, причем амплитуда и частота этих волн будет зависеть соответственно от площади отражающих поверхностей и от скорости перемещения их в пространстве. Фазовая модуляция будет отражать все движения, производимые объектом.
Фазовый детектор U2 преобразует фазовую модуляцию сигнала в широтно-импульсную. Фильтр нижних частот Z1 сглаживает импульсы с выхода фазового детектора U2 и преобразует их в амплитудно-модулированный сигнал. Частота среза фильтра Z 1 равна реальной верхней частоте доплеровского сдвига, в нашем случае 1 кГц.
Фильтр верхних частот Z2 ограничивает снизу частотную полосу, воспринимаемую устройством. Он играет особую роль в устойчивости всей системы к ложным срабатываниям.
Как было отмечено выше, основной причиной возникновения амплитудной модуляции на входе датчика является изменение интерференционной картины в охраняемом пространстве, из-за чего происходит сложение множества волн с произвольной фазой и амплитудой. Изменение амплитуды какой-либо из них, например в результате изменения угла отражения от колеблющегося оконного стекла, вызывает изменение фазы результирующего сигнала. Сложение амплитудно-модулированного сигнала и немодулированного колебания одной и той же частоты уже приводит к фазовому сдвигу, пропорциональному производной от модулирующей функции. Из этого следует, что вибрацию стекла датчик воспримет как доплеровский сдвиг. Спектр этих колебаний, в основном, сосредоточен в частотной области ниже 1—3 Гц. Теперь становится понятна и та особая роль, которая отведена фильтру Z2, особенно исходя из требований по регистрации минимальной скорости передвижения.
Детектор-формирователь U3 преобразует огибающую принимаемого сигнала в пропорциональное ей постоянное напряжение. Усилитель А2 усиливает его до уровня, необходимого для работы устройства индикации HI, обеспечивая при этом определенную задержку, дополнительно снижающую вероятность ложных срабатываний.
Принципиальная схема ультразвукового датчика изображена на рис. 6. 71. Излучателем BF1 и приемником ВМ1 ультразвуковых колебаний служат пьезоэлектрические микрофоны типа УМ-1 с частотой резонанса в интервале 36—46 кГц.
Генератор G1 собран на микросхемах DD1 и DA4 по мостовой схеме. Это сделано для того, чтобы обеспечить оптимальный уровень мощности излучения
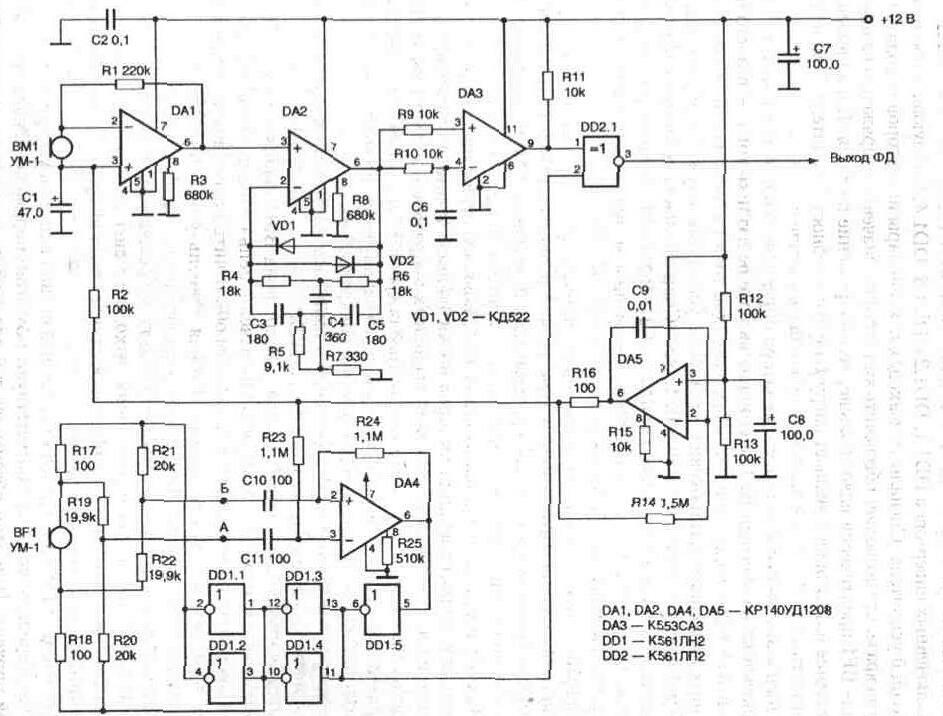
Рис. 6. 71. Ультразвуковой датчик охранной сигнализации
при низком напряжении питания. Кроме того, мостовое включение позволяет возбудить пьезорезонатор BF1 на его собственной резонансной частоте.
Ультразвуковой излучатель BF1 включен между выходами попарно параллельно включенных инверторов DD1. 1, DD1. 2 и DD1. 3, DD1. 4, образующих мостовой выходной усилитель. Сигналы на выходах каждой пары инверторов находятся в противофазе, что позволяет обеспечить амплитудное значение напряжения на излучателе BF1 практически вдвое больше, чем напряжение питания. Параллельное включение инверторов повышает нагрузочную способность усилителя. При необходимости их число в каждом плече может быть увеличено.
Поскольку рабочую частоту генератора определяет собственная частота резонанса тока излучателя BF1, в его цепь включены датчики тока — резисторы R17 и R18. Для выделения сигнала с датчиков тока на фоне высокого амплитудного выходного напряжения мостового усилителя служат прецизионные резисторные делители R19, R20 и R21, R22. Сопротивления резисторов определяются из выражений: R20=R19+ R17 и R21=R22+ R18. Если исключить нагрузку, то и постоянное напряжение, и переменное между точками А и Б будут пропорциональны току через нагрузку.
Напряжение UAБ подано на вход дифференциального усилителя переменного напряжения, собранного на микросхеме DA4. Уровень выходного напряжения усилителя соответствует уровню срабатывания инверторов КМОП микросхемы DD1. Одновременно дифференциальный усилитель подавляет незначительную синфазную составляющую напряжения UAБ. появляющуюся из-за неизбежных отклонений сопротивлений резисторов прецизионного делителя от расчетного и возможной неидентичности значений выходных напряжений инверторов моста. Резистор R25 определяет ток, потребляемый операционным усилителем DA4, и, как следствие, скорость нарастания выходного напряжения. Емкость конденсаторов С10 и С11 имеет оптимум для каждой конкретной частоты.
Буферный инвертор DD1. 5 формирует импульсы с крутыми фронтами, что позволяет повысить КПД генератора на 20%.
Первая ступень усиления сигнала с микрофона ВМ1 выполнена на операционном усилителе DA1. Микрофон включен в цепь отрицательной обратной связи операционного усилителя так, чтобы обеспечить максимальное усиление лишь на его резонансной частоте. Вторая ступень усиления выполнена на операционном усилителе DA2, в цепь отрицательной обратной связи которого включен двойной Т-мост, настроенный на ту же резонансную частоту. Диоды VD1 и VD2 служат для ограничения выходного сигнала и предотвращения перегрузки операционного усилителя в случае, если энергия волны на входе приемника будет слишком велика.
Компаратор DA3 преобразует усиленный сигнал в импульсы прямоугольной формы, перепады которых соответствуют моментам перехода сигнала через нулевой уровень. При этом обеспечивается скважность импульсов, практически равная 2. Эти импульсы поступают на фазовый детектор, выполненный на элементе DD2. 1 (вывод 1). На второй вход фазового детектора (вывод 2 элемента DD2. 1) поступают импульсы с образцового генератора (вывод 6 элемента DD1. 5),
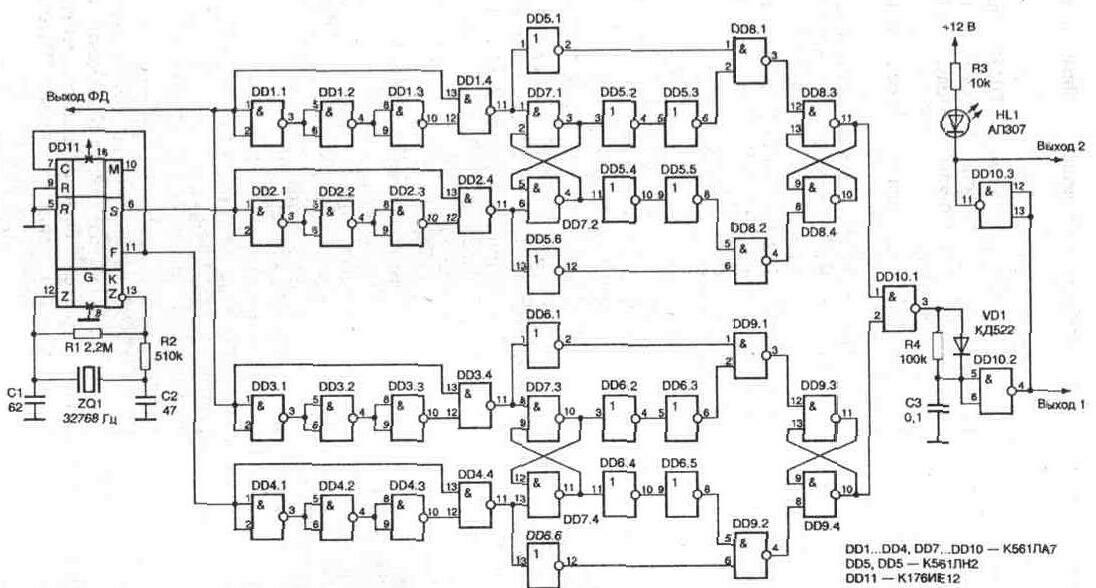
Рис. 6. 72. Цифровой фильтр ультразвукового датчика
имеющие скважность 2. В противном случае, не исключены случайные «провалы» в характеристике чувствительности датчика в моменты, когда образцовый и принятый сигналы окажутся в фазе или противофазе.
Сигнал с выхода фазового детектора (вывод 3 элемента DD2. 1), равный разности фаз принятого и образцового сигналов, представляет собой последовательность прямоугольных импульсов с широтно-импульсной модуляцией и поступает на вход цифрового полосового фильтра.
Цифровой полосовой фильтр (рис. 6. 72) выполнен на микросхемах DD1 — DD11. По сравнению с фильтрами, выполненными на дискретных и аналоговых элементах, цифровые фильтры более просты, надежны и не нуждаются в настройке. К тому же они имеют практически прямоугольную амплитудно-частотную характеристику, что приближает их к идеальному фильтру.
Цифровой фильтр, приведенный на рис. 6. 72, состоит из фильтра нижних и верхних частот, схем формирования коротких импульсов, решающего устройства, устройства индикации движения и образцового генератора.
Образцовый генератор выполнен на специализированной часовой микросхеме К176ИЕ12. Частота задающего генератора стабилизирована кварцевым резонатором ZQ1. С выхода генератора импульсы с частотой следования 32768 Гц поступают на встроенный делитель, с выхода S которого (вывод 6) снимается сигнал с частотой 2 Гц, а с выхода F — сигнал частотой 1024 Гц (вывод 11).
Сигнал с выхода фазового детектора (элемент DD2. 1 на рис. 6. 71) поступает на входы двух формирователей коротких импульсов на микросхемах DD1, DD3. На входы двух других формирователей (DD2 и DD4) с генератора на микросхеме DD11 поступают прямоугольные импульсы частотой 2 Гц и 1024 Гц соответственно. С выходов формирователей (выводы 11 микросхем DD1, DD2 и DD3, DD4) короткие отрицательные импульсы поступают на входы триггеров на элементах DD7. 1, DD7. 2 и DD7. 3, DD7. 4 соответственно.
Рассмотрим случай, когда частота входного сигнала равна, например, 200 Гц. В этом случае на выводе 3 элемента DD8. 1 будут присутствовать короткие отрицательные импульсы, а на выводе 4 элемента DD8. 2 — уровень логической единицы (при частоте менее 2 Гц сигналы поменяются местами). При этом триггер на элементах DD8. 3, DD8. 4 переключится в состояние, когда на его выходе (вывод 11 элемента DD8. 3) будет уровень логической единицы.
Одновременно сигнал частотой 200 Гц поступает на второй канал фильтра, где он сравнивается с сигналом генератора частотой 1024 Гц. При этом на выводе 4 элемента DD9. 2 будут присутствовать короткие отрицательные импульсы. В то же время на выводе 3 элемента DD9. 1 будет уровень логической единицы (при входной частоте более 1024 Гц сигналы на выходах этих элементов поменяются местами). Эти отрицательные импульсы переключат триггер на элементах DD9. 3, DD9. 4 в состояние, когда на его выходе (выход 10 элемента DD9. 4) будет уровень логической единицы. С триггеров сигналы высокого логического уровня поступают на устройство принятия решения на элементе DD10. 1, при этом на выходе последнего (вывод 3) появится уровень логического нуля. Конденсатор СЗ начнет разряжаться через сопротивление резистора R4 до уровня

Рис. 6. 73. Печатная плата датчика
переключения инвертора DD10. 2. В момент переключения последнего и включится индикатор HL1. Элементы VD1, R4, СЗ осуществляют задержку сигнала, что способствует повышению помехоустойчивости датчика.
Индикатор HL1 включается только в те моменты, когда частота входного сигнала более 2 Гц, но менее 1024 Гц. В иных случаях индикатор выключен и датчик не дает сигнала о наличии движущегося объекта.
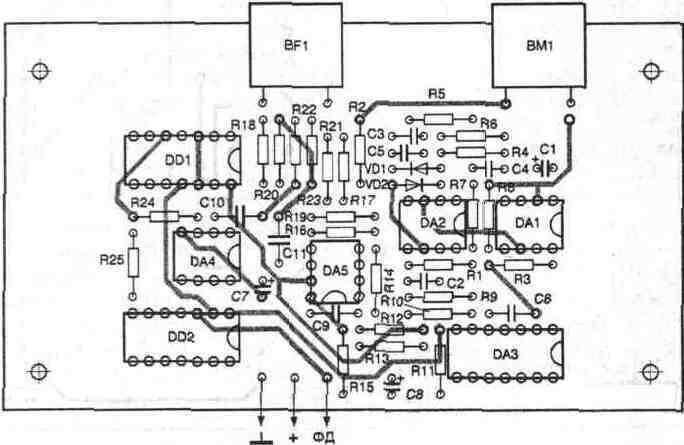
Рис. 6. 74. Размещение деталей на плате датчика
Узел на операционном усилителе DA5 (рис. 6. 71) выполняет функцию формирователя «мнимого нуля» напряжения питания, необходимого для нормальной работы операционных усилителей датчика. Он обеспечивает выходное напряжение, равное половине напряжения источника питания при низком выходном сопротивлении.
Налаживание датчика обычно не вызывает трудностей. Сначала настраивают двойной Т-мост в цепи обратной связи операционного усилителя DA2 на частоту образцового генератора путем одновременного подбора сопротивлений резисторов R4, R5, R6 (или емкости конденсаторов СЗ—С5), соотношение номиналов их при этом не должно измениться.
Резисторы R19—R22 (рис. 6. 71) можно подобрать из обычных МЛТ-0, 125 номиналом 20 кОм с помощью цифрового тестера. Их сопротивление от указанного на схеме может отличаться на 20%, однако соотношение значений сопротивления, указанное выше, должно быть выдержано с точностью не хуже 0, 25%. При большой разнице не исключены фазовые сбои и даже срыв генерации.
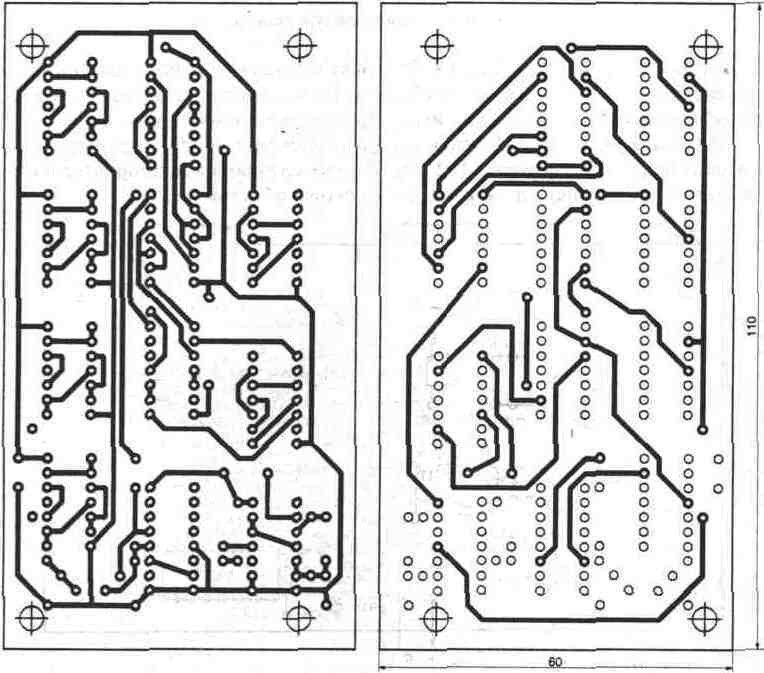
Рис. 6. 75. Печатная плата цифрового фильтра
Цифровой полосовой фильтр (рис. 6. 72) в настройке не нуждается. Нижнюю границу фильтра можно увеличить до 17 Гц. Для этого на вход формирователя на микросхеме DD4 необходимо подать импульсы с выхода М (вывод 10) микросхемы DD11, а не с выхода F, как показано на схеме.
Устройство выполнено на двух печатных платах размером 301 60х108 мм каждая. Платы изготовлены из двухстороннего фольгированного стеклотекстолита. Печатная плата ультразвукового датчика приведена на рис. 6.73, а размещение элементов на ней — на рис. 6.74. Печатная плата цифрового фильтра представлена на рис. 6.75, размещение элементов на ней — на рис. 6.76. Платы монтируются одна над другой на металлических стойках высотой не менее 20 мм. Ультразвуковые приемник и излучатель могут быть расположены под некоторым углом друг к другу.
Ультразвуковой датчик устанавливается в таком месте, чтобы можно было контролировать все входы и выходы и в помещение нельзя было попасть, миновав поле зрения ультразвукового «глаза» (рис. 6. 77).
Для предотвращения ложного срабатывания излучатель нельзя располагать под прямым углом к вибрирующим поверхностям, типа дверей и окон или направлять на место с наибольшей циркуляцией воздуха, например на лестницы и батареи отопления.